華耐機(jī)器人源頭廠家
提供工業(yè)機(jī)器人自動(dòng)化系統(tǒng)解決方案

業(yè)務(wù)咨詢:
華耐機(jī)器人源頭廠家
業(yè)務(wù)咨詢:



發(fā)布時(shí)間:2025-08-15來(lái)源:焊接機(jī)器人廠家閱讀數(shù):62
在工業(yè)自動(dòng)化的宏大版圖中,伺服電機(jī)猶如一位精準(zhǔn)的 “舞者”,憑借其卓越的高精度和快速響應(yīng)能力,在自動(dòng)化設(shè)備、機(jī)器人、數(shù)控機(jī)床等眾多領(lǐng)域大放異彩。而決定這顆 “明星” 能否在不同場(chǎng)景中完美 “起舞” 的關(guān)鍵,正是其多樣的控制模式。接下來(lái),讓我們一同深入探索伺服電機(jī)常用的幾種控制模式,揭開(kāi)它們精準(zhǔn)驅(qū)動(dòng)的奧秘。
轉(zhuǎn)矩控制模式:穩(wěn)控力量的 “大力士”
轉(zhuǎn)矩控制模式的核心目標(biāo),是讓電機(jī)軸穩(wěn)定輸出預(yù)設(shè)的轉(zhuǎn)矩。就像起重機(jī)在吊運(yùn)重物時(shí),必須精準(zhǔn)控制電機(jī)輸出的力量,才能避免重物晃動(dòng)甚至墜落的危險(xiǎn)。在這種模式下,控制器會(huì)實(shí)時(shí)對(duì)比預(yù)先設(shè)定的轉(zhuǎn)矩指令和電機(jī)實(shí)際產(chǎn)生的轉(zhuǎn)矩,計(jì)算出兩者之間的偏差,然后通過(guò)調(diào)整電機(jī)的運(yùn)行狀態(tài)來(lái)消除這個(gè)偏差,確保轉(zhuǎn)矩輸出始終穩(wěn)定。
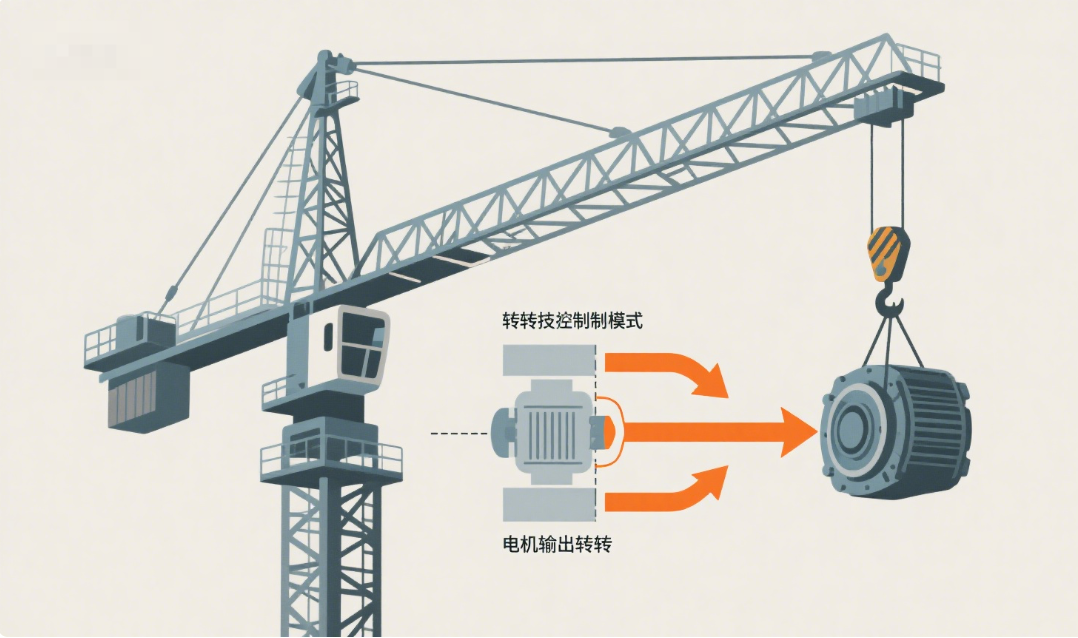
其背后的核心支撐是轉(zhuǎn)矩閉環(huán)控制系統(tǒng),這個(gè)系統(tǒng)由轉(zhuǎn)矩傳感器、控制器、驅(qū)動(dòng)器和電機(jī)共同構(gòu)成。轉(zhuǎn)矩傳感器如同敏銳的 “感知器”,實(shí)時(shí)檢測(cè)電機(jī)軸的實(shí)際轉(zhuǎn)矩,并將其轉(zhuǎn)化為電信號(hào)傳遞給控制器。為了實(shí)現(xiàn)對(duì)轉(zhuǎn)矩的精確把控,該模式常采用 PID 控制算法或模糊控制算法。正因如此,轉(zhuǎn)矩控制模式廣泛應(yīng)用于起重機(jī)、壓力機(jī)、攪拌機(jī)等對(duì)轉(zhuǎn)矩輸出要求極高的設(shè)備中,為這些設(shè)備的穩(wěn)定運(yùn)行提供了可靠保障。
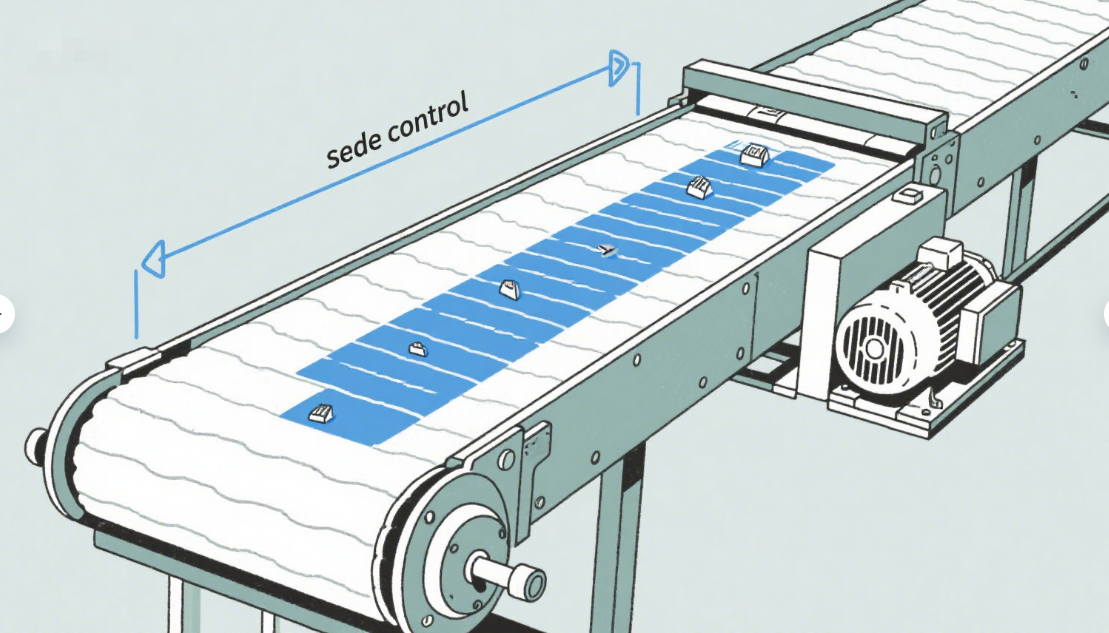
速度控制模式:恒定運(yùn)轉(zhuǎn)的 “節(jié)奏大師”
速度控制模式的目標(biāo)明確,就是讓電機(jī)軸以恒定速度或按預(yù)設(shè)規(guī)律變化的速度運(yùn)轉(zhuǎn)。以輸送帶為例,要保證物料能夠平穩(wěn)地從一端輸送到另一端,就需要電機(jī)軸保持恒定的轉(zhuǎn)速。此時(shí),控制器會(huì)根據(jù)給定的速度指令和電機(jī)實(shí)際運(yùn)行的速度進(jìn)行對(duì)比,算出速度偏差后,通過(guò)驅(qū)動(dòng)器對(duì)電機(jī)的運(yùn)行進(jìn)行調(diào)控,直到電機(jī)轉(zhuǎn)速達(dá)到預(yù)定速度。
速度閉環(huán)控制系統(tǒng)是速度控制模式的核心,它由速度傳感器、控制器、驅(qū)動(dòng)器和電機(jī)組成。速度傳感器就像精準(zhǔn)的 “測(cè)速儀”,時(shí)刻檢測(cè)電機(jī)軸的實(shí)際速度,并將其轉(zhuǎn)換為電信號(hào)傳送給控制器。和轉(zhuǎn)矩控制模式類似,速度控制模式通常也采用 PID 控制算法,通過(guò)精確調(diào)整比例、積分、微分這三個(gè)系數(shù),實(shí)現(xiàn)對(duì)電機(jī)速度的精準(zhǔn)控制。這種模式在輸送帶、風(fēng)機(jī)、泵等需要恒定或按規(guī)律變化速度的場(chǎng)景中得到了廣泛應(yīng)用。
位置控制模式:精準(zhǔn)定位的 “導(dǎo)航專家”
位置控制模式致力于讓電機(jī)軸精確地抵達(dá)預(yù)設(shè)位置。在數(shù)控機(jī)床加工零件時(shí),電機(jī)軸必須按照預(yù)定的軌跡精確移動(dòng),才能保證零件的加工精度。在該模式下,控制器會(huì)依據(jù)給定的位置指令和電機(jī)軸的實(shí)際位置,計(jì)算出位置偏差,進(jìn)而調(diào)整電機(jī)的運(yùn)行狀態(tài)來(lái)消除偏差,確保電機(jī)軸準(zhǔn)確到達(dá)目標(biāo)位置。
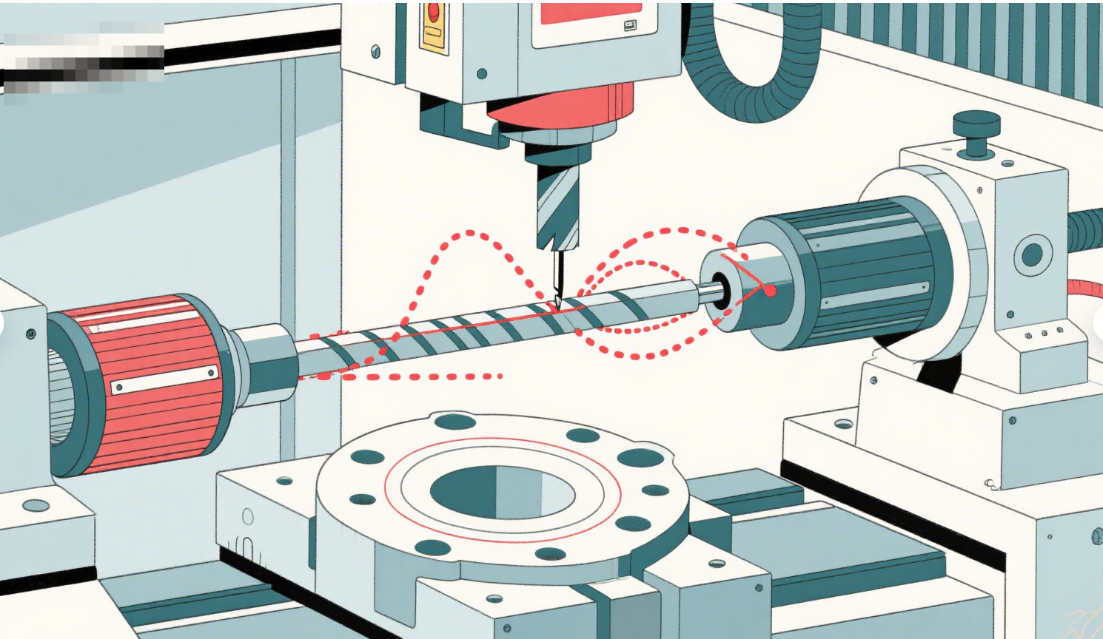
位置閉環(huán)控制系統(tǒng)由位置傳感器、控制器、驅(qū)動(dòng)器和電機(jī)構(gòu)成。位置傳感器如同精準(zhǔn)的 “定位儀”,實(shí)時(shí)檢測(cè)電機(jī)軸的實(shí)際位置,并將其轉(zhuǎn)換為電信號(hào)傳遞給控制器。位置控制模式同樣常采用 PID 控制算法,通過(guò)合理調(diào)整比例、積分、微分系數(shù),實(shí)現(xiàn)對(duì)電機(jī)位置的精確控制。它在數(shù)控機(jī)床、機(jī)器人關(guān)節(jié)、自動(dòng)化裝配線等對(duì)位置精度要求極高的場(chǎng)合中發(fā)揮著重要作用。
全閉環(huán)控制模式:極致精度的 “升級(jí)方案”
全閉環(huán)控制模式是相對(duì)于半閉環(huán)控制的 “進(jìn)階版本”,專為追求極致精度而生。在半閉環(huán)控制中,數(shù)控系統(tǒng)或 PLC 發(fā)出速度脈沖指令后,伺服電機(jī)執(zhí)行指令,過(guò)程中伺服電機(jī)自身的編碼器會(huì)將位置信息反饋給伺服系統(tǒng)進(jìn)行偏差修正,但這種方式無(wú)法避免機(jī)械誤差,因?yàn)榭刂葡到y(tǒng)并不知道電機(jī)軸的實(shí)際位置。
而在全閉環(huán)控制模式下,伺服電機(jī)接收上位控制器發(fā)出的速度可控脈沖指令并執(zhí)行,同時(shí)機(jī)械裝置上的位置反饋裝置會(huì)直接將實(shí)際位置信息反饋給控制系統(tǒng)。控制系統(tǒng)對(duì)比指令位置和實(shí)際位置后判斷偏差,再向伺服電機(jī)發(fā)出修正指令,從而實(shí)現(xiàn)更精準(zhǔn)的控制。這種將伺服電機(jī)、運(yùn)動(dòng)控制器、位置傳感器有機(jī)結(jié)合的控制模式,能達(dá)到極高的精度,常用于對(duì)精度要求極高的高端制造設(shè)備中。
伺服電機(jī)的這幾種控制模式各具特色,分別適用于不同的應(yīng)用場(chǎng)景。在實(shí)際應(yīng)用中,只有根據(jù)設(shè)備的具體需求和性能要求,精心選擇合適的控制模式,才能充分發(fā)揮伺服電機(jī)的優(yōu)勢(shì),提升整個(gè)自動(dòng)化系統(tǒng)的穩(wěn)定性、精度和性能。你在日常工作中使用過(guò)哪種控制模式呢?歡迎分享你的使用經(jīng)驗(yàn)。
上一篇: 焊接機(jī)器人的使用場(chǎng)景有哪些要求和原則
下一篇: 行業(yè)新聞
華耐機(jī)器人
電話:0311-80815335
業(yè)務(wù)咨詢:13932182008
工廠地址:河北省石家莊市欒城區(qū)南車路與中科街交叉口南行600米路東
辦公地址:河北省石家莊市長(zhǎng)安萬(wàn)達(dá)寫(xiě)字樓B座718 719室

器人廠家微信公號(hào)")


網(wǎng)站版權(quán)所有©焊接機(jī)器人廠家-變位機(jī)-工業(yè)機(jī)器人-華耐機(jī)器人 丨 網(wǎng)站備案號(hào): 冀ICP備18029854號(hào)-1  冀公網(wǎng)安備 13019902000669號(hào) 技術(shù)支持:七星網(wǎng)絡(luò)
冀公網(wǎng)安備 13019902000669號(hào) 技術(shù)支持:七星網(wǎng)絡(luò)